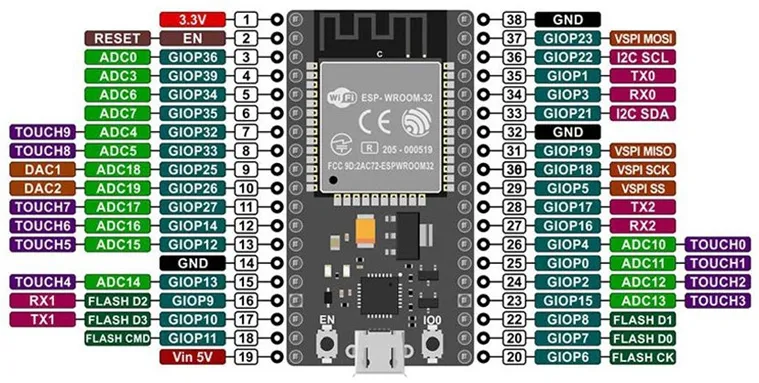
ESP32 Board (e.g. DevKitC)
GrowSpace Developer Tag
| Item | Purpose |
|---|---|
ESP32 Board (e.g. DevKitC) | For serial data reception and parsing |
GrowSpace Developer Tag | Location Data Transmitting Device |
| Arduino IDE | Code Writing and Upload |
| Jumper Cables (4-pin) | For connecting TX, RX, GND, 3.3V |