ESP32 연동
실시간 위치 데이터 수신 및 파싱 (lec / lep 명령어 활용)
이 글에서는
GrowSpace 개발자 태그를 Arduino ESP32 보드에 연결하여, lec, lep 명령어를 통해 실시간 위치 데이터를 수신하고 파싱하는 방법을 안내합니다. 처음 ESP32와 태그를 연결해보는 분들도 쉽게 따라할 수 있도록 단계별로 친절하게 설명드리겠습니다.
ESP32는 UNO와 달리 다중 하드웨어 시리얼을 지원하며, 소형 테스트 환경 구성에 적합한 보드입니다
준비물
ESP32 보드 (예: DevKitC)

시리얼 수신 및 파싱
GrowSpace 개발자 태그

위치 정보 송신 장치
Arduino IDE
코드 작성 및 업로드
점퍼 케이블 (4핀)
TX, RX, GND, 3.3V 연결용
Arduino IDE 설정
설치
Arduino IDE 공식 페이지에서 설치 파일 다운로드 https://www.arduino.cc/en/software
Windows 사용자는
.msi인스톨러 권장
ESP32 보드 추가
Arduino IDE 실행 →
File > Preferences

Additional Board Manager URLs에 아래 주소 입력:

Tools > Board > Board Manager→ ESP32 설치

설치 후
Tools > Board > ESP32 Dev Module선택Tools > Port에서 자동 인식된 포트 선택

시리얼 연결 구성
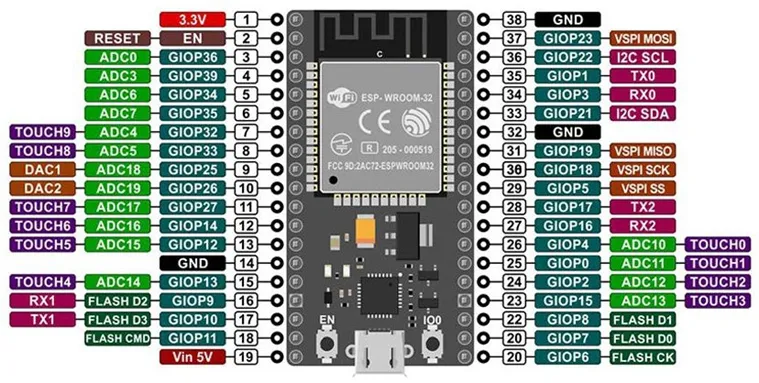
GrowSpace 개발자 태그의 좌측 커넥터는 3.3V 시리얼을 지원합니다. ESP32 보드의 TX2/RX2 핀에 아래와 같이 연결하세요:
TX
GPIO 16 (RX2)
RX
GPIO 17 (TX2)
GND
GND
3.3V
3.3V
⚠️ TX ↔ RX는 반드시 교차 연결해야 합니다. 예: 태그 TX → ESP32 RX, 태그 RX → ESP32 TX

아래는 ESP32 DevKit의 핀맵입니다. TX2/RX2의 위치를 확인하고 정확히 연결해 주세요:
시리얼 중계 예제 코드
이 코드는 PC와 태그 간 시리얼 데이터를 ESP32가 중계하는 코드입니다.
시리얼 모니터 설정: 115200bps,
Newline전송 설정si명령어를 입력했을 때 장비 정보가 출력되면 연결 성공입니다.
위치 데이터 파싱 예제 (lep / lec 명령어)
개발자 태그는 lep 또는 lec 명령어를 통해 현재 위치 정보를 반환합니다. 아래 코드는 해당 응답을 분석하고 보기 좋게 출력하는 예제입니다.
lep 실행 결과

lec 실행 결과

테스트 방법 요약
위 코드를 업로드한 후 Arduino IDE의 시리얼 모니터 실행
lep또는lec명령어를 입력위치 정보가 정상적으로 출력되는지 확인 (XYZ 좌표, 거리 등)
마무리
이 매뉴얼에서는 GrowSpace 개발자 태그를 ESP32와 연결하여, 시리얼 통신을 통해 위치 명령어를 입력하고 데이터를 수신/파싱하는 전체 흐름을 안내드렸습니다.
이 과정을 통해 단일 태그의 실시간 위치 추적이 가능하며, 이후 BLE 전송, Wi-Fi 연동, MQTT 연동 등 다양한 확장 실험으로 이어질 수 있습니다.
혹시 실습 중 연결이 안 되거나 응답이 없을 경우, TX/RX 핀 교차 연결 여부와 시리얼 포트 설정을 꼭 다시 확인해주세요!
Last updated